|
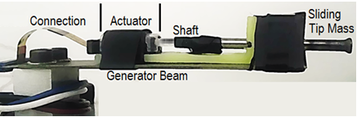
Piezoelectric Energy Harvester with Tunable Natural Frequency
Researcher: Nezih Topaloğlu
Students: Cevat Volkan Karadağ Abstract: In this project, auto-tuning of the natural frequency of a cantilever beam type piezoelectric energy harvester is proposed. The objective is tune the natural frequency of the piezoelectric cantilever beam in order to match the natural frequency with the frequency of external vibration. This way, one can improve the energy harvesting efficiency, in cases where the frequency of ambient vibration fluctuates. |
|
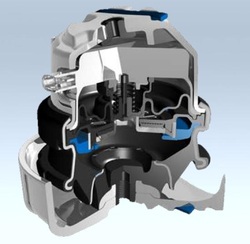
Design and Fabrication of an Active Engine Mount
|
|
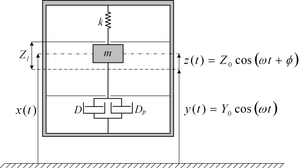
Energy Harvesting with Nonlinear Electrical DampingResearcher: Nezih Topaloğlu
Abstract: Various methods have been proposed to increase the efficiency of vibration energy harvesters. We propose an energy harvester with nonlinear electrical damping, in which electrical damping increases as the proof mass approaches its displacement limits. Due to this nonlinearity, it is expected that the average velocity of the proof mass increases in one cycle resulting in higher generator efficiency. In order to compare the performances of linear and nonlinear damping systems, both systems were modeled and solved numerically in MATLAB environment. Current research is on analytically determining the damping profile that optimizes the harvested electrical power. |
|
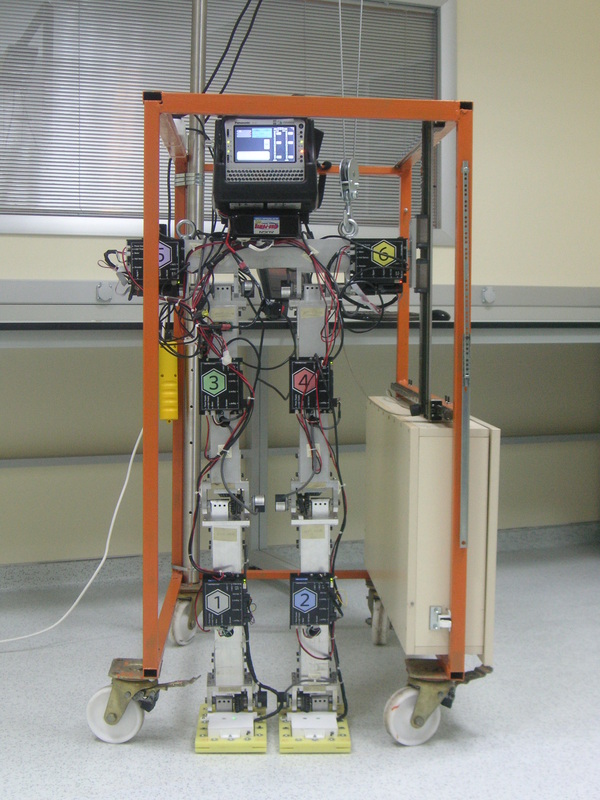
Researcher: Koray K. Şafak
Students: T. Batuhan Baturalp, C. Volkan Karadağ Abstract: In this project, a biomimetic bipedal robot has been designed and manufactured. The robot structure is based on human lower extremity with anthropomorphic dimensions. The robot has a total mass of 22 kg and leg length of 1.2 m. Within the scope of this project, kinematic and dynamic modeling and simulations were made and basic design criteria were defined, which leads to the design of a prototype. Following the design phase, robot parts have been manufactured and assembled. A real-time control software has been developed that integrates the outputs from foot contact force sensors and the inertial measurement unit. Gait synthesis methods have also been studied in order to achieve stable stable walking. |
